Press release – Meet ViCANdo 4.0!
Zuragon Technologies Ltd(UK) has released a new version of ViCANdo – a powerful, cross-platform and easy-to-use ADAS/AD development platform that shortens the prototyping journey and system integration time for you who wants to step into the Autonomous Driving/ADAS development.
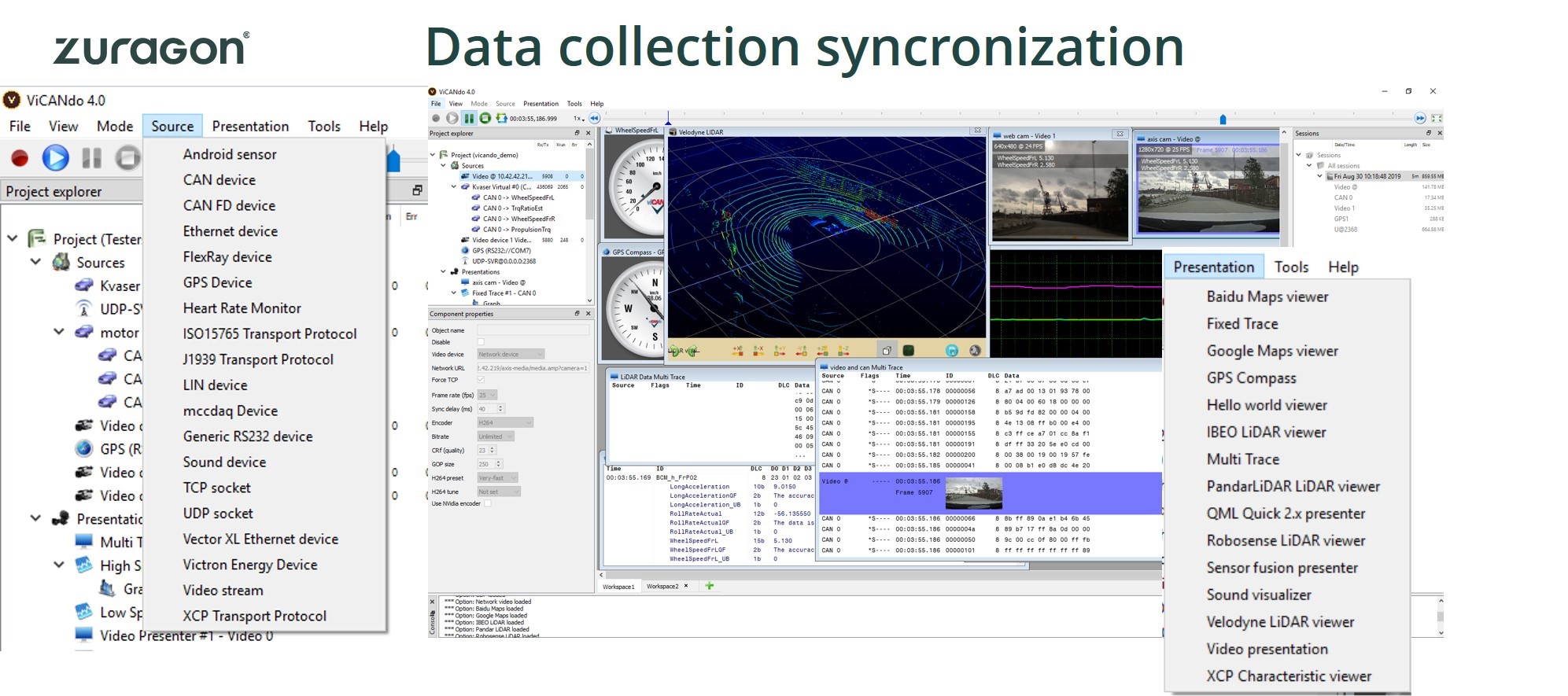
(ViCANdo, source: Zuragon.)
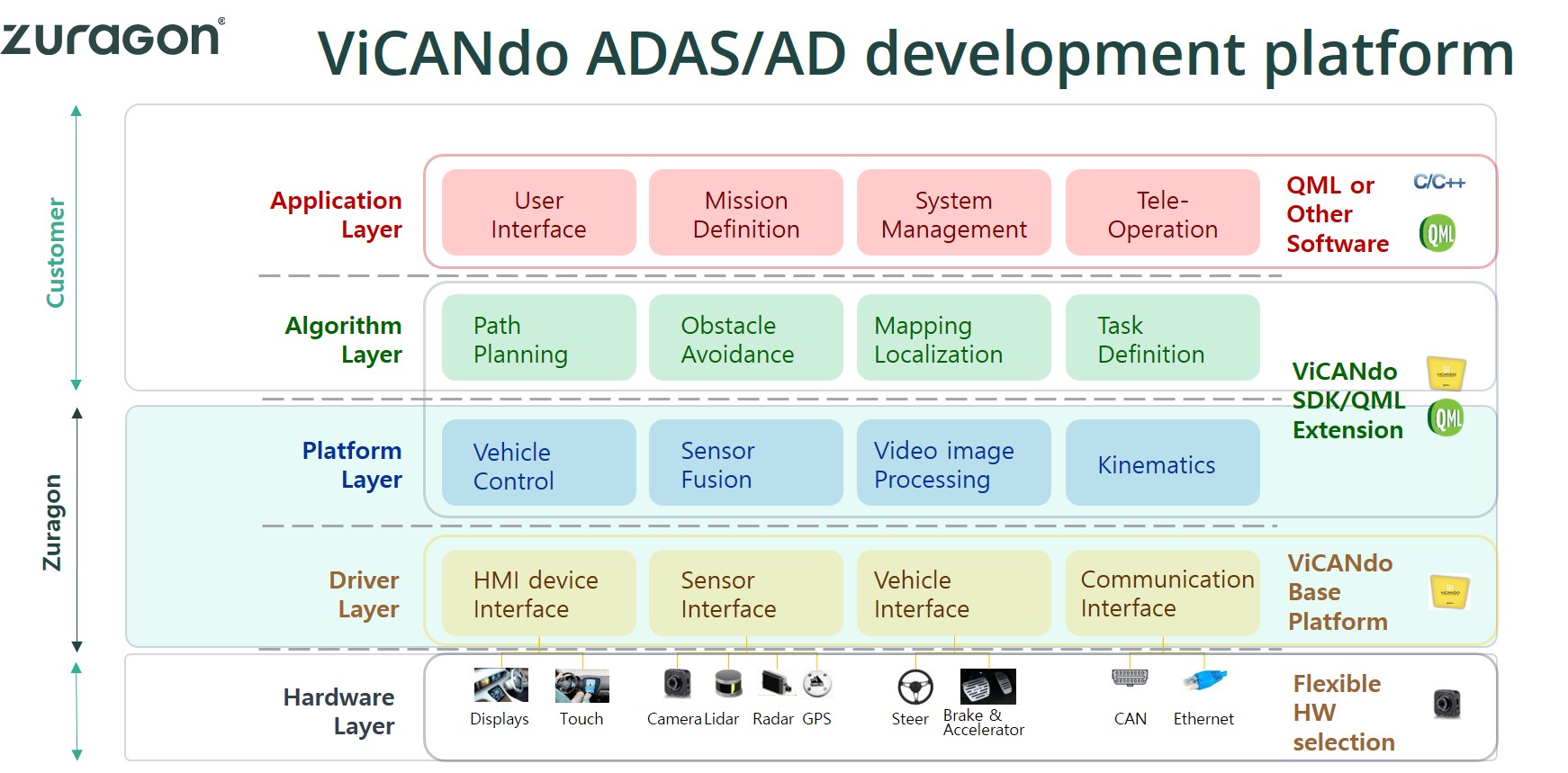
(ViCANdo development platform, Image source: Zuragon.)
The new version 4.0 has major updates for session UI and traffic generator which will allow you to use ViCANdo as a gateway, as well as other general improvements to both the software and the SDK.
Instead of logging everything into a giant log file, ViCANdo uses a more flexible and performance driven approach for data storage. Each source (camera, radar, lidar, CAN, CAN FD, FlexRay etc.) has its own log file with the universal software timestamp and its own timestamp from the hardware(e.g. The timestamp provided by a Kvaser CAN interface). This approach makes fast search of items and scenes from the log files come true.
In ViCANdo, a session means a single data record and it contains all the log files for all the enabled sources user has configured. The log files can be exported to the formats that are used widely in the industry, such as PCAP for Ethernet data, csv, txt, Vector ASCII as well as Kvaser compatible txt format for CAN data. It is also possible to import log files from other tools to ViCANdo, currently supported file formats are Vector ASCII, Vector BLF as well as ViGEM VPcap. Often, when post analysing the giant amount of data you only want to focus on the period when the event of interest happens, therefore, apart from the bookmarks, triggers the software already supported, in the new version, it is possible to crop a session from the original session between two timestamps. This is a long-awaited feature for customers who want to use small videos to train algorithms and annotate scenes.
Below figure illustrates the supported hardware by ViCANdo until the time of writing:
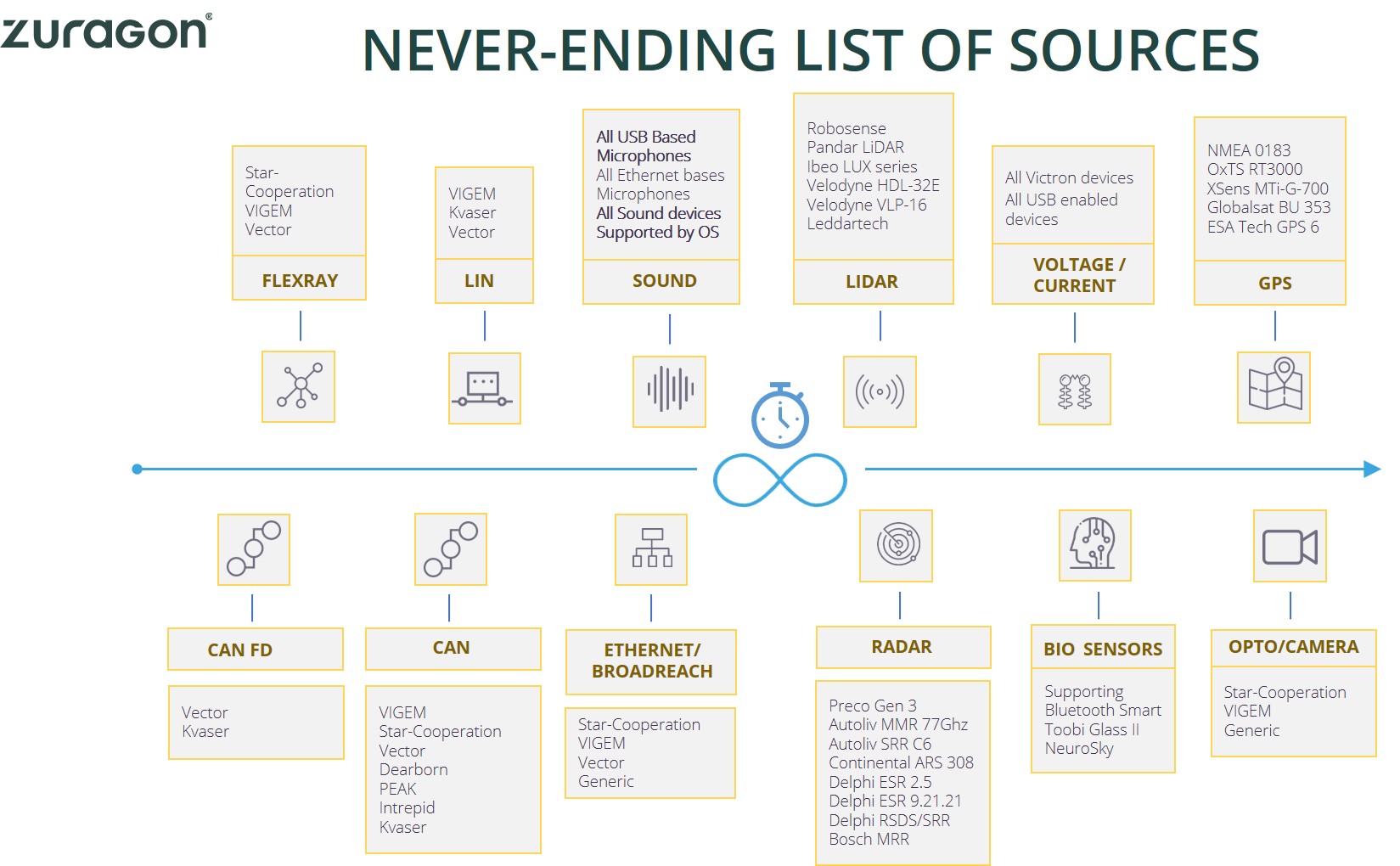
(Supported hardware by ViCANdo, source: Zuragon)
Other new features are:
Gateway mode in Traffic generator allows you to use ViCANdo as a gateway. It enables re-routing of incoming and outgoing traffic with the possibility to change the values of the signal on the fly.
Virtual CAN to UDP – allows you to forward CAN messages from virtual CAN channel to UDP even though you don’t have any real CAN hardware or CAN network at hand.
QML & JavaScript scripting:
With the easy-to-use QML scripting API in ViCANdo, you can access basically all the data logged with ViCANdo. In version 4.0 we have unlocked the access of the database files via QML API. This allows you to find any messages, nodes, signals from the database file without knowing their names in advance. True big data management at your finger tips.
ViCANdo SDK:
Customer is always the owner of their data. ViCANdo SDK(QML and C++ API on both Windows and Linux platforms) gives customers full access to the data they have logged. With the support of third party open source libraries, such as openCV and PCL (point cloud library), customers can make the most of their lidar point cloud data and develop their own sensor fusion algorithms.
ViCANdo is the core of the complete ViCANdo suite, together with ViCANsim, ViCANlog, ViCANdroid as well as ViCANbedded, the software platform provides scalable, flexible and portable solutions for OEMs and tier 1 and 2 suppliers, and all data and all code is portable at all times. When the number of test vehicles grows, the amount of data grows, data and fleet management becomes a practical problem needs to be addressed. Therefore Zuragon’s cloud service “ZEUS” – the fleet/data management tool of all the vehicles equipped with ViCANlog or ViCANbedded come in handy. With continuously accumulated miles worldwide, ViCANdo suite helps engineers to focus on their own application development instead of wasting time on parsing data from various sources/sensors.
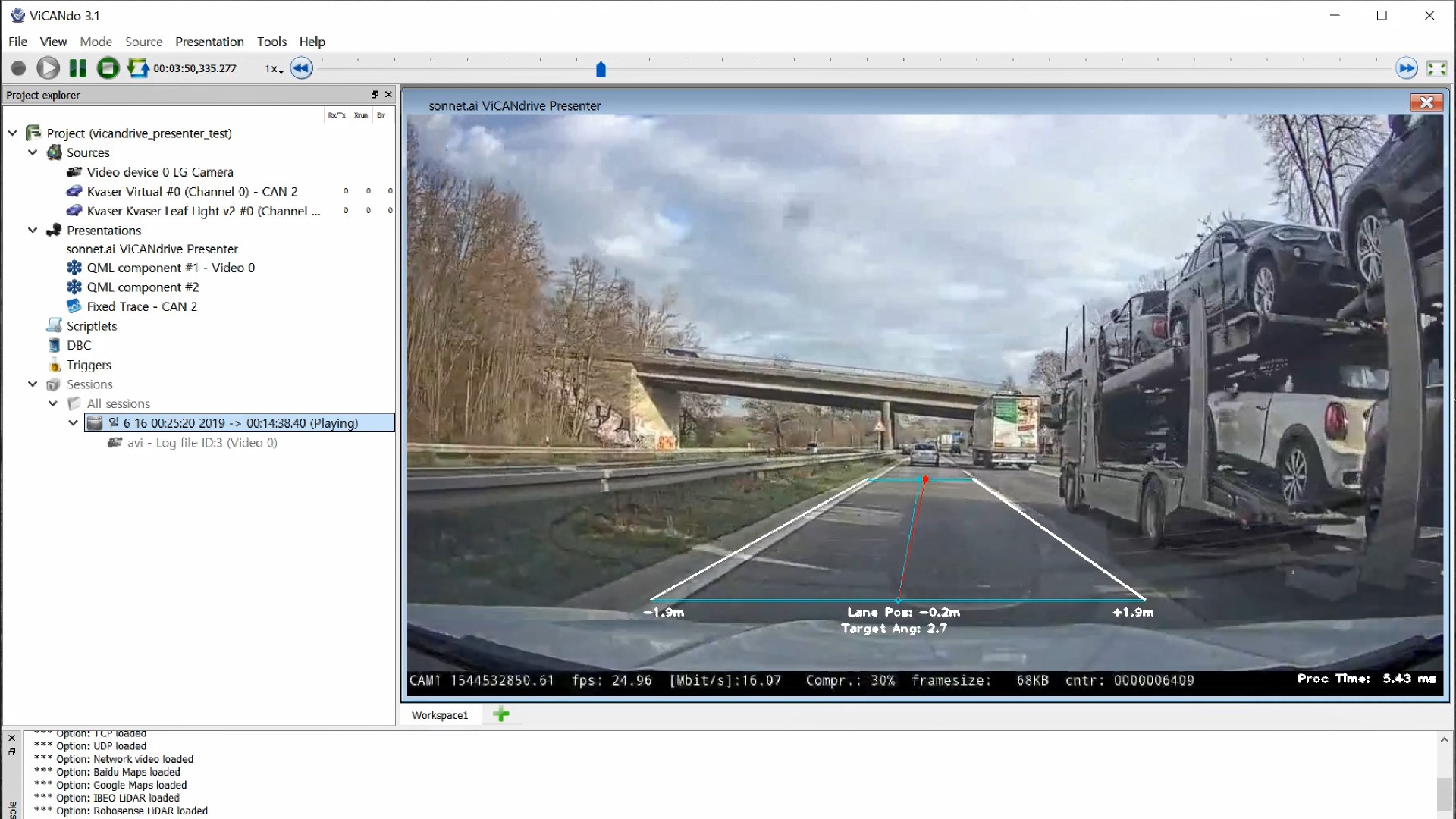
(Lane keeping developed by Sonnet Ai in South Korea, source: Zuragon)